|
> Exemples de dimension 3 > Fibrés sur le cercle > Suspensions d’homéomorphismes linéaires du tore Suspensions d’homéomorphismes linéaires du tore |

La suspension d’un homéomorphisme (ou difféomorphisme) $f$ du tore $\mathbb{T}^{2}$ est la variété :
$$V_f=\mathbb{T}^{2}\times[0,1]/(x,0)\sim(f(x),1).$$
Il s’agit d’un cas particulier de fibré sur le cercle. L’objectif de ce texte est d’étudier ces suspensions.
Par exemple, une matrice $A\in \mathrm{SL}_2(\mathbb{Z})$ induit un difféomorphisme $f_A$ du tore $\mathbb T^2 = \mathbb R^2 / \mathbb Z^2$ défini par $f_A([x,y])=[A(x,y)]$ pour tout $(x,y)\in\mathbb R^2$. Ce difféomorphisme est dit linéaire. La suspension de $f_A$ [1], définie comme le quotient de $\mathbb T^2 \times [0,1]$ par la relation d’équivalence qui identifie $(x,0)$ et $(f(x),1)$, nous donne une variété de dimension $3$ orientable que l’on notera $V_A$.
L’exemple précédent est en fait général. En effet, tout difféomorphisme du tore est isotope à un difféomorphisme linéaire (voir l’article sur le groupe modulaire des surfaces). Comme la topologie d’une suspension ne dépend que de la classe d’isotopie de l’application de recollement, pour étudier les suspensions du tore, on peut se contenter d’étudier les suspensions linéaires.
Les suspensions d’homéomorphismes linéaires du tore sont considérées par Poincaré dans les paragraphes 11, 13 et 14 de l’Analysis Situs et correspondent à son sixième exemple. Son objectif est de montrer que les nombres de Betti ne suffisent pas à décrire une variété. Pour cela, il classifie le groupe fondamental de ces variétés et obtient beaucoup plus de classes que celles données par les nombres de Betti. La première partie de ce texte présente cette classification.
Bien que les variétés $V_A$ soient toutes construites de la même manière, elles peuvent être géométriquement très différentes. La seconde partie de ce texte se concentre sur la traduction géométrique sur $V_A$ de certaines propriétés de $A$.
Plus précisément, les matrices de $\mathrm{SL}_2(\mathbb Z)$ peuvent être regroupées en trois catégories :
- $A$ est elliptique si ses valeurs propres sont complexes conjuguées (et donc de module 1) et $A$ est diagonalisable sur $\mathbb C$. Les matrices elliptiques sont d’ordre fini.
- $A$ est parabolique si ses valeurs propres sont $\pm1$ et que $A$ n’est pas diagonalisable.
- $A$ est hyperbolique si ses valeurs propres sont réelles (elles sont alors inverses l’une de l’autre) et différentes de $\pm1$.
Les images ci-dessous montrent l’effet de quatre itérations de difféomorphismes du tore associés aux matrices $\begin{pmatrix}0&1\\-1&0\end{pmatrix}$, $\begin{pmatrix}1&1\\0&1 \end{pmatrix}$ et $\begin{pmatrix}2&1\\1&1\end{pmatrix}$, respectivement elliptique, parabolique et hyperbolique (le tore est ici représenté par une photo d’Henri Poincaré).
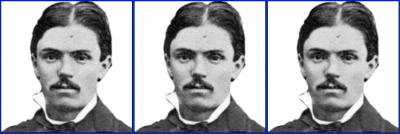
- Trois copies du tore $\mathbb T^2$

- $f_A(\mathbb T^2)$

- $f_A^2(\mathbb T^2)$
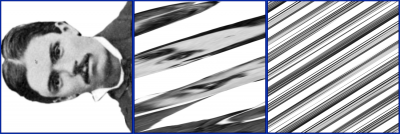
- $f_A^3(\mathbb T^2)$
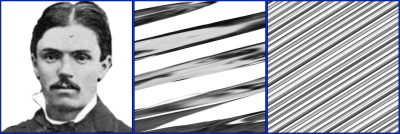
- $f_A^4(\mathbb T^2)$
Les explications présentées ici sont partiellement données dans la vidéo suivante.
Groupe fondamental
Notre première étape est donc de décrire le groupe fondamental de la suspension $V_A$ où $A\in \mathrm{SL_2}(\mathbb{Z})$. Pour cela, considérons le sous-groupe $G_A$ des transformations affines de $\mathbb{R}^3$ engendré par
- les translations de vecteurs $(1,0,0)$ et $(0,1,0)$ ;
- la transformation $(x,y,z)\longmapsto (A(x,y), z+1)$.
Ce groupe agit de façon topologiquement libre sur $\mathbb R^3$ et on a
$$V_A\simeq G_A \backslash \mathbb R^3~.$$
Comme $\mathbb R^3$ est simplement connexe, c’est le revêtement universel de $V_A$, et le groupe fondamental de $V_A$ est donc isomorphe à $G_A$. Remarquons que l’on peut remplacer les translations de vecteurs $(1,0,0)$ et $(0,1,0)$ par n’importe quelle famille de translations dont les vecteurs engendrent le réseau $\mathbb Z^2\times\{0\}$.
Notre groupe $G_A$ peut être vu de plusieurs autres façons.
![]() On peut le décrire par générateurs et relations : $G_A$ est le groupe engendré par les éléments $t_1$, $t_2$ et $g_A$ vérifiant les relations
On peut le décrire par générateurs et relations : $G_A$ est le groupe engendré par les éléments $t_1$, $t_2$ et $g_A$ vérifiant les relations
- $t_1t_2 = t_2t_1$
- $ g_At_1g_A^{-1} = t_1^\alpha t_2^\gamma$
- $ g_At_2g_A^{-1} = t_1^\beta t_2^\delta$
où $A=\begin{pmatrix}\alpha&\beta\\ \gamma&\delta \end{pmatrix}.$ Ici $t_1$, $t_2$ et $g_A$ correspondent aux trois générateurs de $G_A$ décrits ci-dessus. L’approche par générateurs et relations est utilisée par Poincaré dans le paragraphe 14 pour étudier les groupes $G_A$.
![]() Le groupe $G_A$ peut également être vu comme un produit semi-direct : c’est une extension de $\mathbb Z$ par $\mathbb Z^2$ décrite par la suite exacte scindée :
Le groupe $G_A$ peut également être vu comme un produit semi-direct : c’est une extension de $\mathbb Z$ par $\mathbb Z^2$ décrite par la suite exacte scindée :
$$\xymatrix{ 0 \ar[r] & \mathbb Z^2 \ar[r]_i &G_A \ar[r]_p &\mathbb Z \ar[r] \ar@/_/[l]_s &0 }$$
On retrouve alors $A$ de la façon suivante : soit $g=s(1)$, alors pour tout $t\in i\left(\mathbb Z^2\right)$, on a la relation de commutation $gtg^{-1} = A(t)$. La notation $A(t)$ signifie ici (un peu abusivement) $i(At')$ où $t=i(t')$. Plus généralement, on identifiera souvent $\mathbb Z^2$ et $i\left(\mathbb Z^2\right)$. Remarquons que tout élément de $G_A$ s’écrit de façon unique comme le produit $tg^m$ où $t\in i\left(\mathbb Z^2\right)$ et $m\in\mathbb Z$. Remarquons encore que si on prend $g'$ tel que $p(g')=1$ et une autre section $s'$ vérifiant $s'(1)=g'$ alors rien ne change dans les descriptions précédentes.
Nombres de Betti
La description de groupe fondamental de $V_A$ nous permet de déterminer ses groupes d’homologie, et en particulier ses nombres de Betti. En effet, par le théorème d’Hurewicz, le premier groupe d’homologie à coefficients entiers s’identifie à l’abélianisé du groupe fondamental. On obtient ainsi le nombre $b_1$. Les autres nombres de Betti s’obtiennent alors directement : $b_0=b_3=1$ (car $V_A$ est connexe et orientable) et $b_1=b_2$ (par dualité de Poincaré).
Calculons donc $b_1$ en suivant la méthode de Poincaré. Ajoutons les relations $t_1g_A=g_At_1$ et $t_2g_A=g_At_2$ à la description de $G_A$ par générateurs et relations. On obtient alors que $H_1(V_A)$ est linéairement engendré par $g_A$, $t_1$ et $t_2$ avec comme relations (en passant en notation additive) :
- $(\alpha-1)t_1+\gamma t_2 = 0$
- $\beta t_1 + (\delta-1)t_2 = 0$.
Autrement dit, on a
$$H_1(V_A) = \mathbb Z \oplus \mathbb Z^2/(A-\mathrm{I}_2)(\mathbb Z^2)~.$$
Par conséquent :
- si $A=\mathrm{Id}$, alors $H_1(V_A) = \mathbb Z^3$ et, en particulier, $b_1=3$.
- si $A \neq \mathrm{Id}$ et $1$ est valeur propre de $A$, alors $A$ est conjuguée dans $\mathrm{GL}_2(\mathbb Z)$ à la matrice $\begin{pmatrix}1&k\\0&1 \end{pmatrix}$ où $k\in\mathbb N^*$. On obtient alors $H_1(V_A,\mathbb Z) = \mathbb Z^2 \oplus \mathbb Z/ k \mathbb Z$ et en particulier $b_1 = 2$.
- sinon, l’image de $A-\mathrm{Id}$ est de rang $2$, donc d’indice fini dans $\mathbb{Z}^2$. On a donc $H_1(V_A) = \mathbb Z \oplus H$ où $H$ est un groupe fini. En particulier, $b_1=1$.
Remarque. Pour être plus rigoureux dans notre calcul de l’abélianisé de $G_A$, on peut calculer son sous-groupe dérivé $D(G_A)$. On obtient alors :
Le groupe dérivé de $G_A$ est le sous-groupe $i\left( \mathrm{im}(A-\mathrm{Id})\right)$.
Le théorème de Hurewicz nous dit alors que
$$H_1(V_A) = G_A/D(G_A)~.$$
Soient $a$ et $b$ deux éléments de $G_A$. On peut écrire $a= i(t)g_A^k$ et $b= i(t')g_A^l$. On calcule alors que
$$aba^{-1}b^{-1} = i(A^k t' - t') = i(Au-u)$$
où $u = t'+At' + \ldots + A^{k-1} t'$.
Par conséquent, tout commutateur d’éléments de $G_A$ est dans $i\left( \mathrm{im}(A-\mathrm{Id})\right)$. De plus, en choisissant convenablement $a$ et $b$, on peut aisément écrire tout élément de $i\left( \mathrm{im}(A-\mathrm{Id})\right)$ comme un commutateur. Comme $i\left( \mathrm{im}(A-\mathrm{Id})\right)$ est un sous-groupe de $G_A$, on conclut que c’est le sous-groupe engendré par les commutateurs.
C.Q.F.D.
Les nombres de Betti des variétés $V_A$ sont donc souvent les mêmes. Nous allons maintenant voir à quelle condition sur $A_0$ et $A_1$ dans $\mathrm{SL}_2(\mathbb Z)$ les variétés $V_{A_0}$ et $V_{A_1}$ sont homéomorphes.
Classification des ($\pi_1$ des) suspensions linéaires du tore
On souhaite donc comprendre à quelle condition les variétés $V_{A_0}$ et $V_{A_1}$ sont homéomorphes (pour $A_0, A_1\in\mathrm{SL}_2(\mathbb Z)$). On connaît déjà un certain nombre de situations dans lesquelles c’est le cas :
- Si $A_0$ et $A_1$ sont conjuguées dans $\mathrm{GL}_2(\mathbb Z)$. Cela revient alors à effectuer un changement de base. Plus précisément, si $A\in\mathrm{SL}_2(\mathbb Z)$ et $B \in \mathrm{GL}_2(\mathbb Z)$, l’homéomorphisme $\phi$ de $\mathbb R^3$ défini par $\phi(x,y,z)=(B(x,y),z)$ pour tout $(x,y,z)\in\mathbb R^3$ envoie $g_A$ sur $g_{BAB^{-1}}$, $t_1$ sur la translation de vecteur $(B(1,0),0)$ et $t_2$ sur la translation de vecteur $(B(0,1),0)$. Il passe donc au quoitient en un homéomorphisme entre $V_A$ et $V_{BAB^{-1}}$.
- Si $A_1=A_0^{-1}$. Cela revient à renverser l’axe des $z$. Plus précisément, si $A\in\mathrm{SL}_2(\mathbb Z)$, l’homéomorphisme $\phi$ de $\mathbb R^3$ défini par $\phi(x,y,z)=(x,y,-z)$ pour tout $(x,y,z)\in\mathbb R^3$ envoie $g_A$ sur $g_{A^{-1}}^{-1}$ et préserve $t_1$ et $t_2$. Il passe donc au quotient en un homéomorphisme entre $V_A$ et $V_{A^{-1}}$.
Nous allons montrer qu’on a en fait trouvé tous les cas d’homéomorphisme. Dans le paragraphe 14, Poincaré démontre essentiellement le théorème suivant.
La variété $V_{A_0}$ est homéomorphe (ou difféomorphe) à $V_{A_1}$ si et seulement si $A_0$ est conjuguée à $A_1$ ou à $A_1^{-1}$ dans $\mathrm{GL}_2 ( \mathbb{Z})$.
Comme nous venons de voir que $V_{A_0}$ et $V_{A_1}$ sont homéomorphes lorsque $A_0$ est conjuguée à $A_1$ ou $A_1^{-1}$, il reste à voir que c’est aussi une condition nécessaire, ce qui découle du théorème suivant :
Le groupe $G_{A_0}$ est isomorphe à $G_{A_1}$ si et seulement si $A_0$ est conjuguée à $A_1$ ou à $A_1^{-1}$ dans $\mathrm{GL} (2, \mathbb{Z})$.
On a déjà vu que si $A_0$ est conjugué à $A_1$ ou $A_1^{-1}$ dans $\mathrm{GL}_2(\mathbb Z)$ alors les variétés $V_{A_0}$ et $V_{A_1}$ sont homéomorphes. Les groupes $G_{A_0}$ et $G_{A_1}$ sont donc a fortiori isomorphes.
On considère maintenant $A_0$ et $A_1$ dans $\mathrm{SL}_2(\mathbb Z)$ tels que $G_{A_0}$ et $G_{A_1}$ soient isomorphes. Notons $\phi$ cet isomorphisme. Il induit un isomorphisme entre les premiers groupes d’homologie de $V_{A_0}$ et $V_{A_1}$. Par conséquent :
- Soit $A_0=A_1=\mathrm{Id}$ et il n’y a rien à prouver.
- Soit $1$ est valeur propre de $A_0$ et $A_1$, ces deux matrices sont alors respectivement conjuguées dans $\mathrm{GL}_2(\mathbb Z)$ à $\begin{pmatrix}1&k_0\\0&1 \end{pmatrix}$ et $\begin{pmatrix}1&k_1\\0&1 \end{pmatrix}$ où $k_0, k_1\in\mathbb N^*$. L’isomorphisme entre $H_1(V_{A_0})$ et $H_1(V_{A_1})$ impose $k_0 = k_1$ et on obtient finalement que $A_0$ et $A_1$ sont conjuguées.
- Soit $1$ n’est valeur propre ni de $A_0$ ni de $A_1$ et il va falloir travailler un peu plus...
On suppose donc dans la suite de la preuve que $1$ n’est valeur propre ni de $A_0$ ni de $A_1$. On a alors le diagramme suivant.
$$\xymatrix{ 0 \ar[r] & \mathbb Z^2 \ar[r]_{i_0} &G_{A_0} \ar[r]_{p_0} \ar[d]^\phi &\mathbb Z \ar[r] \ar@/_/[l]_{s_0} &0 \\0 \ar[r] & \mathbb Z^2 \ar[r]_{i_1} &G_{A_1} \ar[r]^{p_1} &\mathbb Z \ar[r] \ar@/^/[l]^{s_1} &0}$$
Comme $\phi$ est un isomorphisme, on a $\phi(D(G_{A_0}))=D(G_{A_1})$. Comme $D(G_{A_0})$ est d’ordre fini dans $i_0\left(\mathbb Z^2\right)$, on en déduit que $\phi\left(i_0\left(\mathbb Z^2\right)\right)\subset i_1\left(\mathbb Z^2\right)$. En effet, si $t\in i_0\left(\mathbb Z^2\right)$, il existe $k\in\mathbb N^*$ tel que $t^k\in D(G_{A_0})$ et $p_1\left(\phi\left(t^k\right)\right)=kp_1\left(\phi(t)\right)=0$. Par symétrie, on a donc
$$\phi\left(i_0\left(\mathbb Z^2\right)\right)= i_1\left(\mathbb Z^2\right).$$
L’isomorphisme $\phi$ induit donc un isomorphisme $B : \mathbb Z^2\to\mathbb Z^2$. On obtient alors le diagramme suivant.
$$\xymatrix{ 0 \ar[r] & \mathbb Z^2 \ar[r]_{i_0} \ar[d]^B&G_{A_0} \ar[r]_{p_0} \ar[d]^\phi &\mathbb Z \ar@/_/[l]_{s_0} \ar[r] &0 \\0 \ar[r] & \mathbb Z^2 \ar[r]_{i_1} &G_{A_1} \ar[r]^{p_1} &\mathbb Z \ar[r] \ar@/^/[l]^{s_1} &0}$$
Soit $g_0=s_0(1)$. On note $g_1=\phi(g)$. Comme $g_1$ engendre $G_{A_1}/i_1\left(\mathbb Z^2\right)$ (le quotient est bien défini car $ i_1\left(\mathbb Z^2\right)$ est un sous-groupe distingué de $G_{A_1}$), on a $p_1(g_1)=\pm1$. On distingue alors deux cas.
Premier cas : $p_1(g_1)=1$. Quitte a changer $s_1$, on peut supposer que $s_1(1)=g_1$. Pour tout $t\in i_1\left(\mathbb Z^2\right)$, on alors alors
$$BA_0 t= \phi(A_0 t) = \phi \left(g_0 t g_0^{-1}\right) = g_1 \phi(t) g_1^{-1} = A_1 \phi(t) = A_1 Bt$$
d’où
$$ B A_0 B^{-1} = A_1.$$
Second cas : $p_1(g_1)=-1$. Quitte a changer $s_1$, on peut supposer que $s_1(g_1)=-1$. Pour tout $t\in i_1\left(\mathbb Z^2\right)$, on alors alors
$$BA_0 t= \phi(A_0 t) = \phi \left(g_0 t g_0^{-1}\right) = g_1^{-1} \phi(t) g_1 = A_1^{-1} \phi(t) = A_1^{-1} Bt$$
d’où
$$ B A_0 B^{-1} = A_1^{-1}.$$
On obtient donc le résultat voulu.
C.Q.F.D.
Deux variétés ayant les mêmes groupes d’homologie ne sont pas nécessairement homéomorphes.
Prenons par exemple
$$A_0=\begin{pmatrix}0&1\\ -1&0 \end{pmatrix}\quad \text{et}\quad A_1=\begin{pmatrix}2&1\\ 3&2 \end{pmatrix}$$
On vérifie que les variétés $V_{A_0}$ et $V_{A_1}$ ont le même premier groupe d’homologie, à savoir $\mathbb Z \oplus\mathbb Z/2\mathbb Z$. En revanche, elles ne sont pas homéomorphes, puisque $A_0$ n’est pas conjuguée à $A_1$ ni à $A_1^{-1}$ (en effet, $A_0$ est elliptique alors que $A_1$ est hyperbolique).
En dimension $3$, le groupe fondamental est donc un invariant plus "puissant" que l’homologie, puisqu’il permet de distinguer $V_{A_0}$ et $V_{A_1}$, ce que l’homologie ne permet pas.
Géométrisation de $V_A$
Pour finir cette présentation des suspensions du tore, Nous allons expliquer qu’on peut géométriser les variétés, $V_A$ c’est-à-dire les écrire comme des quotients d’une variété riemannienne homogène (et plus précisément d’une des huit structures géométriques modèles appelées géométries de Thurston). La géométrie modèle dépend de la classe de conjugaison de $A$ et plus particulièrement de son type : elliptique, parabolique ou hyperbolique. Le polynôme caractéristique de $A$ est $\chi_A(X) = X^2-{\mathrm tr}(A) X+1$ et le discriminant de ce dernier ${\mathrm tr}^2(A)-4$. Les différents cas correspondent au signe de ce discriminant.
Remarquons d’abord que si $n\in\mathbb N^*$, alors $V_{A^{n}}$ est un empilement de $n$ copies de $V_A$, ou, plus rigoureusement, l’application $p :V_{A^n}\to V_A$ définie par $p([x,y,z])=[(x,y,nz)]$ pour tout $(x,y,z)\in\mathbb R^3$ est un revêtement cyclique d’ordre $n$.
Cas 1 : $-1\le {\mathrm tr}(A)\le 1$ : la matrice est elliptique et $f_A$ est périodique. Dans ce cas, $A$ n’a pas de valeur propre réelle et est d’ordre fini (égal à $3$, $4$ ou $6$). On en déduit que $V_A$ admet comme revêtement fini le tore $\mathbb{T}^3$, quotient de l’espace euclidien par un réseau.
Cas 2 : ${\mathrm tr}(A)=\pm2$ et $A$ est diagonalisable : la matrice est elliptique ou l’identité et $f_A$ est périodique. Dans ce cas $A$ est $\pm I$ et donc $V_A$ est soit le tore $\mathbb{T}^3$ soit admet le tore comme revêtement double.
Cas 3 : ${\mathrm tr}(A)=\pm2$ et $A$ n’est pas diagonalisable : la matrice est parabolique et $f_A$ est réductible. La matrice $A$ est alors conjuguée à une matrice de la forme
$$\left( \begin{array}{cc} \pm 1 & n \\ 0 & \pm 1 \end{array} \right)$$
avec $n$ un entier non nul. On va montrer que, quitte à passer un revêtement double, $V_A$ est le quotient du groupe de Heisenberg $H$ par l’action à gauche d’un de ses sous-groupes discrets. Tout d’abord, quitte à passer à un revêtement double de $V_A$ en considérant $A^2$ à la place de $A$, on peut supposer que les coefficients diagonaux de $A$ sont égaux à $1$.
On rappelle que le groupe de Heisenberg est le groupe nilpotent des matrices réelles $3\times 3$ triangulaires supérieures avec des $1$ sur la diagonale :
$$H = \left\{\left( \begin{array}{ccc} 1 & t & x \\ 0 & 1 & y \\ 0 & 0 & 1 \end{array} \right), t, x, y \in\mathbb R \right\}$$
En tant que variété, ce groupe est difféomorphe à $\mathbb{R}^3$ avec une loi de composition qui est « tordue » par rapport à la somme usuelle des vecteurs. Considérons les matrices suivantes
$$T_1 = \left( \begin{array}{ccc} 1 & 0 & 1 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{array} \right)\quad T_2= \left( \begin{array}{ccc} 1 & 0 & 0 \\ 0 & 1 & 1 \\ 0 & 0 & 1 \end{array} \right)\quad G = \left( \begin{array}{ccc} 1 & n & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{array} \right) .$$
Ces matrices engendrent un sous-groupe discret $\Gamma$ du groupe de Heisenbeg qu’on peut faire agir à gauche sur le groupe de Heisenberg lui même. Alors l’application
$$\begin{array}{ccc} H&\longrightarrow &\mathbb R^3\\ \begin{pmatrix}1&t&x\\0&1&y\\0&0&1 \end{pmatrix}&\longmapsto& ((x,y), t/n) \end{array}$$
est un difféomorphisme qui envoie l’action de $T_1$ sur la translation de vecteur $(1,0,0)$, l’action de $T_2$ sur la translation de vecteur $(0,1,0)$ et l’action de $G$ sur la transformation $(x,y,z)\longmapsto (A(x,y), z+1)$. On obtient donc un isomorphisme entre $\Gamma\backslash H$ et $V_A$.
Cas 4 : ${\mathrm tr}^2(A)\ge 5$ : la matrice est hyperbolique et $f_A$ est Anosov. Dans ce cas la matrice $A$ admet deux valeurs propres réelles inverses l’une de l’autre. Comme dans le cas précédent on va montrer que, quitte à passer à un revêtement fini, $V_A$ est obtenu en quotientant un groupe de Lie — ici le groupe $\mathrm{Sol}$ — par un sous-groupe discret.
On note $(e_1,e_2)$ la base canonique de $\mathbb R^2$. Quitte à prendre $A^2$ à la place de $A$ et passer à un revêtement double de $V_A$, on peut supposer que les valeurs propres $\lambda$ et $\lambda^{-1}$ de $A$ sont positives et $\lambda>1$. On pose $c = \ln(\lambda)$. Soit $(v_1,v_2)$ une base de vecteurs propres pour $A$ (dans $\mathbb R^2$). On a alors $Av_1=e^c v_1$ et $Av_2=e^{-c} v_2$. Dans la base $(e_1,e_2)$, on écrit $v_1 = (a_1,b_1)$ et $v_2=(a_2,b_2)$ et on note $P=\begin{pmatrix}a_1&a_2\\b_1&b_2\end{pmatrix}$ la matrice de changement de base associée que l’on suppose de déterminant $1$. On a alors $A = PBP^{-1}$ où $B=\begin{pmatrix}e^c&0\\0&e^{-c}\end{pmatrix}$.
Le groupe $\mathrm{Sol}$ est le produit semi-direct $\mathbb R\rtimes_{f} \mathbb R^2$ où $f(t)=\begin{pmatrix}e^t&0\\0&e^{-t}\end{pmatrix}\in\mathrm{End}(\mathbb R^2)$ pour tout $t\in\mathbb R$. On peut également décrire $\mathrm{Sol}$ sous forme matricielle. On a alors
$$\mathrm{Sol} = \left\{\left( \begin{array}{ccc} e^t & 0 & a \\ 0 & e^{-t} & b \\ 0 & 0 & 1 \end{array} \right), t, a, b \in\mathbb R \right\}$$
Considérons les matrices suivantes
$$T_1 = \left( \begin{array}{ccc} 1 & 0 & b_2 \\ 0 & 1 & -b_1 \\ 0 & 0 & 1 \end{array} \right)\quad T_2= \left( \begin{array}{ccc} 1 & 0 & -a_2 \\ 0 & 1 & a_1 \\ 0 & 0 & 1 \end{array} \right)\quad G = \left( \begin{array}{ccc} e^c & 0 & 0 \\ 0 & e^{-c} & 0 \\ 0 & 0 & 1 \end{array} \right) .$$
Ces matrices engendrent un sous-groupe discret $\Gamma$ de $\mathrm{Sol}$ qu’on peut faire agir à gauche sur $\mathrm{Sol}$. Alors l’application
$$\begin{array}{ccc} \mathrm{Sol}&\longrightarrow &\mathbb R^3\\ \begin{pmatrix}e^t & 0 & a \\ 0 & e^{-t} & b \\ 0 & 0 & 1\end{pmatrix}&\longmapsto& (P(a,b), t/c)\end{array}$$
est un difféomorphisme qui envoie l’action de $T_1$ sur la translation de vecteur $(1,0,0)$, l’action de $T_2$ sur la translation de vecteur $(0,1,0)$ et l’action de $G$ sur la transformation $(x,y,z)\longmapsto (A(x,y), z+1)$. On obtient donc un isomorphisme entre $\Gamma\backslash \mathrm{Sol}$ et $V_A$.
Croissance du groupe fondamental
Les matrices de $\mathrm{SL}_2(\mathbb Z)$ comprennent les matrices hyperboliques, elliptiques et paraboliques (décrites là). On a vu que ces trois catégories donnent des groupes $G_A$ et des variétés $V_A$ très différents. Ces différences se lisent aussi sur les propriétés de croissance du groupe $G_A$. C’est ce qu’on se propose d’expliquer maintenant.
Soit $G$ un groupe de générateurs $g_1,\dots, g_k$ (on considérera toujours le système de générateurs $t_1, t_2, g$ pour $G_A$). La croissance de $G$ est le comportement asymptotique avec $n$ du nombre d’éléments de $G$ pouvant s’écrire à l’aide d’au plus $n$ générateurs. Par exemple un groupe abélien finiment engendré croît polynomialement et un groupe libre exponentiellement. La croissance d’un groupe est une notion fondamentale de théorie géométrique des groupes. Pour plus de détails, on pourra consulter [2]
On identifie $G_A$ avec l’orbite de $o$, l’origine de $\mathbb R^3$, c’est à dire $\mathbb Z^3$. La vidéo suivante montre la projection sur les deux premières coordonnées des points de $\mathbb Z^3$ que l’on peut obtenir à partir de $o$ en appliquant au plus $n$ générateurs de $G_A$ pour les matrices $\begin{pmatrix}0&1\\-1&0\end{pmatrix}$, $\begin{pmatrix}1&1\\0&1 \end{pmatrix}$ et $\begin{pmatrix}2&1\\1&1\end{pmatrix}$, respectivement elliptique, parabolique et hyperbolique et pour $n$ compris entre $1$ et $20$.
Si $A$ est hyperbolique, le groupe $G_A$ a une croissance exponentielle.
Démonstration. On note $\lambda>1$ et $\frac{1}{\lambda}$ les valeurs propres de $A$, $E_\lambda$ et $E_\frac{1}{\lambda}$ les espaces propres associés.
Pour tout $n$ entier, on pose
$$P_n=\left\{(x,y,z)\in\mathbb Z^3, x^2+y^2\leq\lambda^{2n} \text{ et } \vert z\vert \leq n \right\}.$$
Le nombre de points de $P_n$ croît exponentiellement avec $n$. Pour obtenir une croissance exponentielle de $G_A$, il suffit de montrer que, pour $n$ assez grand, tous les éléments de $P_n$ peuvent être atteints à partir de l’origine $o$ en faisant agir au plus $O(n)$ générateurs de $G_A$.
Un vecteur $q\in \mathbb Z^2$ admet deux décompositions qui vont nous intéresser dans la suite. Tout d’abord la décomposition le long des espaces propres de $A$ : $q=q_\lambda+q_\frac{1}{\lambda}$. On a alors $Aq=\lambda q_\lambda+\frac{1}{\lambda}q_\frac{1}{\lambda}$. La décomposition précédente n’est pas à valeur entières, on considère donc également sa meilleure approximation entière $q=a+b$ où $a=q_\lambda+e \in \mathbb Z^2$ et $b=q_\frac{1}{\lambda}-e \in \mathbb Z^2$ avec $e$ de norme minimale.
Soit donc $p=(q,z)\in P_n$. On veut ramener $p$ en $o$ en faisant agir $t_1^{\pm 1}$, $t_2^{\pm 1}$ et $g^{\pm 1}$. À chaque itération, on conserve (un peu abusivement) les notations $p=(q,z)$ et $q=a+b$.
On procède de la façon suivante.
- On applique $g$ à $p$ et donc $A$ à $q$ jusqu’à obtenir $\Vert b\Vert_2\leq\lambda$. Comme $\Vert q\Vert_2 \leq \lambda^n$, il suffit de $O(n)$ opérations. On a alors $\Vert a \Vert_2 \leq \lambda ^{O(n)}$.
- On applique maintenant les translations $O(\lambda)$ fois pour obtenir $b=0$.
- On applique ${g}^{-1}$, on obtient à nouveau $\Vert b\Vert_2\leq\lambda$.
- On utilise $O(\lambda)$ translations pour ramener $b$ en $0$.
- On répète $O(n)$ fois les deux étapes précédentes jusqu’à obtenir $\Vert a\Vert_2\leq\lambda$.
- On ramène finalement $a$ en $0$ en $O(\lambda)$ translations.
- On a ainsi ramené la coordonnée $q$ à $0$ en $O(n)$ opérations. Pendant ce temps, la coordonnée $z$ est restée un $O(n)$ et en appliquant $O(n)$ fois $g$ ou $g^{-1}$ (suivant le signe de $z$), on se retrouve enfin en $o$.
Au final, on a ramené $p$ en $o$ en $O(n)$ opérations. On obtient donc une croissance exponentielle.
C.Q.F.D.
Si $A$ est elliptique, le groupe $G_A$ a une croissance polynomiale.
Démonstration. On note $C_n$ l’ensemble des éléments de $\mathbb Z^3$ qui s’obtiennent à partir de $o$ en appliquant au plus $n$ générateurs de $G_A$. Pour obtenir une croissance polynomiale, on montre que $C_n$ est contenu dans une boule de rayon $O(n)$ pour une norme bien choisie.
Comme $A$ est elliptique, il existe une norme $\Vert\cdot\Vert_A$ sur $\mathbb R^2$ pour laquelle $A$ est une isométrie. On pose alors $\Vert (x,y,z)\Vert = \Vert (x,y)\Vert_A+ \vert z\vert$. Il existe une constante $c$ telle que pour tout générateur $R$ de $G_A$ et pour tout $p\in\mathbb R^3$, on ait $\Vert R(p)\Vert\leq \Vert p\Vert +c$. Par conséquent $C_n\subset B(o, cn)$ et la croissance est polynomiale.
C.Q.F.D.
Si $A$ est parabolique, le groupe $G_A$ a une croissance polynomiale.
Démonstration. Quitte à conjuger $A$ dans $\mathrm{GL}_2(\mathbb Z)$, on peut supposer que
$$A=\left(\begin{array}{cc}\pm 1& k \\0 & \pm 1\end{array}\right)$$
où $k\in\mathbb Z^*$.
On montre alors par récurrence sur $n$ que si $(x,y,z)\in\mathbb Z^3$ s’obient à partir de l’origine de $\mathbb R^3$ en faisant agir $n$ générateurs de $G_A$ alors
$$\vert x\vert\leq k n^2, \, \vert y\vert\leq n, \, \vert z\vert \leq n. $$
On obtient donc une croissance polynomiale.
C.Q.F.D.
[1] Il serait plus correct de parler de tore de suspension de $f_A$. Mais on se retrouverait à parler de « tore de suspension d’un difféomorphisme du tore », ce qui serait lourd et source de confusion.
[2] P. de la Harpe. Topics in Geometric Group Theory. Chicago Lectures in Mathematics, Univ. of Chicago Press, 2000.