|
> Exemples de dimension 3 > Topologie des variétés de dimension 3 > Quaternions, rotations, fibrations Quaternions, rotations, fibrations |
"Quaternions... though beautifully ingenious, have been an unmixed evil to those who have touched them in any way."
Lord Kelvin (1882)
Notre but est d’expliquer grâce aux quaternions les isomorphismes suivants :
$$\begin{array}{c} \mathbb{S}^3 \simeq \mathrm{SU}(2) \\ \mathbb{RP}^3 \simeq \mathrm{SO}(3, \mathbb{R}) \\ ( \mathbb{S}^3 \times \mathbb{S}^3) / \{\pm 1 \} \simeq \mathrm{SO}(4, \mathbb{R}). \end{array}$$
Il s’agit d’isomorphismes de groupes de Lie, c’est-à-dire de variétés différentiables munies de structures de groupes compatibles avec la structure différentielle.
La clé de ces isomorphismes est donnée par les interprétations suivantes :
- les rotations de l’espace euclidien de dimension $4$ (vu comme espace de tous les quaternions) s’obtiennent par double multiplication à gauche et à droite par les points de la sphère $\mathbb{S}^3$ des quaternions de norme $1$ ;
- les rotations de l’espace euclidien de dimension $3$ (vu comme espace des quaternions purement vectoriels) s’obtiennent par conjugaison par les points de cette même sphère $\mathbb{S}^3$.
Avant d’aller plus loin, voici une présentation en musique du principal artisan des quaternions, William Rowan Hamilton, proposée par l’excellente chaîne acapellascience.
Analogies entre quaternions et nombres complexes
Au début des années 1830, les nombres imaginaires de la forme $a + ib$, avec $i^2 = -1$, les coefficients $a$ et $b$ étant des réels, venaient d’être rebaptisés nombres complexes par Gauss, nom qui leur restera [1]. On avait aussi appris à lever le mystère sur la nature de l’étrange nombre $i$, en disant que $a +ib$ était juste une manière - bien commode pour les calculs - de noter le couple $(a,b)$ de nombres réels.
La multiplication des nombres complexes pouvait alors se voir comme une multiplication de tels couples :
$$ (a_1 , b_1) (a_2, b_2) = (a_1 a_2 - b_1 b_2, a_1 b_2 + a_2 b_1). $$

- William Rowan Hamilton
C’est dans ces années 1830 que Hamilton chercha a définir une multiplication analogue pour les triplets de nombres réels. L’un de ses guides était que la multiplication par un nombre complexe pouvait s’interpréter comme une similitude du plan de ceux-ci, $i$ correspondant à une rotation d’un quart de tour dans le sens positif. Hamilton était confiant qu’une interprétation géométrique analogue devait exister pour la multiplication par un triplet, cette fois-ci comme une transformation de l’espace euclidien tridimensionnel.
Mais Hamilton ne parvint pas pendant 10 ans à trouver une telle multiplication. Enfin, en 1843 il eut un flash et il comprit qu’il pouvait définir une telle multiplication non pas pour des triplets, mais pour des quadruplets, qu’il baptisa « quaternions ». Il grava alors les équations fondamentales suivantes, clefs de cette multiplication, sur le pont à côté duquel il avait eu l’illumination :
$$ i^2 = j^2 = k^2 = ijk = -1. $$
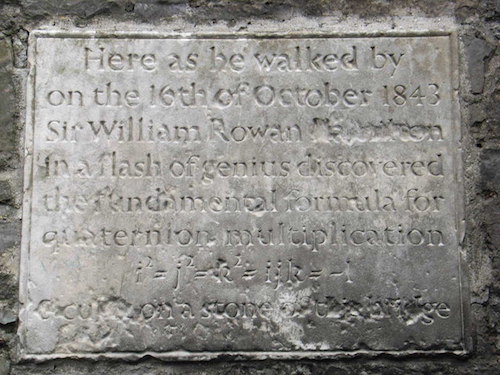
- Brougham bridge, Dublin
Mais, tout d’abord, qu’est-ce qu’un quaternion ?
Un quaternion est un quadruplet $(a,b,c,d)$ de nombres réels, mais vu comme le « nombre » :
$$ a + i b + j c + k d, $$
par analogie avec l’écriture $a+ib$ des nombres complexes.
Pourquoi les équations fondamentales gravées sur le pont sont-elles suffisantes pour multiplier deux quaternions quelconques ? Parce que Hamilton postula que l’addition et la multiplication des quaternions vérifiaient aussi quelques règles de base valables pour les nombres réels et aussi pour les nombres complexes :
- l’addition est commutative et associative ;
- la multiplication est associative ;
- la multiplication est distributive par rapport à l’addition ;
- les nombres réels commutent avec tous les quaternions.
Voici comment ces règles permettent de calculer le produit $ij$ à partir des équations fondamentales (le fait que l’on n’ait pas besoin de parenthèses lorsqu’on fait un produit de plusieurs facteurs provient de l’associativité) :
$$ ij = ij(-1)(-1) = (-1)ij(-1) = - ij(-1)= -ijk^2= - (ijk)k = -(-1)k = k. $$
En continuant de cette manière on arrive à avoir le système complet suivant
de produits deux par deux des « nombres » $i,j,k$ :
$$ ij = - ji =k, \: jk = -kj = i, \: ki = -ik =j. $$
Maintenant c’est immédiat de voir que le produit de deux quaternions est encore un quaternion : il suffit de distribuer le produit par rapport à l’addition, de passer tous les coefficients réels à droite (ce qui est permis par leur commutation avec tous les quaternions) et d’utiliser les produits élémentaires précédents et les équations fondamentales $i^2 = j^2 = k^2 = -1$. On trouve alors la formule suivante, analogue de celle écrite plus haut pour le produit de deux nombres complexes :
$$ \begin{array}{ll} (a_1 + i b_1 + j c_1 + k d_1)(a_2 + i b_2 + j c_2 + k d_2) = & (a_1 a_2 - b_1 b_2 - c_1 c_2 - d_1 d_2) + \\ & i(a_1 b_2 + b_1 a_2 + c_1 d_2 - d_1 c_2) + \\ & j(a_1 c_2 - b_1 d_2 + c_1 a_2 + d_1 b_2) + \\ & k(a_1 d_2 + b_1 c_2 - c_1 b_2 + d_1 a_2). \end{array} $$
Par analogie avec la définition de la partie réelle et de la partie imaginaire d’un nombre complexe, Hamilton introduisit les dénominations suivantes :
Si $ q = a + i b + j c + k d $ est un quaternion, alors $a$ est sa partie scalaire et $i b + j c + k d$ sa partie vectorielle.
C’est l’origine de la dénomination d’espace vectoriel, même si lui-même n’introduisit jamais une telle notion en dimension quelconque.
Notons par $\mathbb{H}$ l’ensemble des quaternions, muni de l’addition composante par composante et de la multiplication précédente. C’est un $\mathbb{R}$-espace vectoriel de base $(1, i, j, k)$. On vérifie alors que ces opérations vérifient bien toutes les règles de calcul précédentes.
Mais une autre règle de calcul vérifiée pour les nombres réels ou complexes cesse d’être valable pour les quaternions : la multiplication n’est plus commutative, comme le montre déjà la relation $ij = -ji$. D’ailleurs Hamilton explique que le désir de définir une multiplication commutative pour les triplets est ce qui l’a longtemps bloqué.
- Ferdinand Georg Frobenius
$\mathbb{H}$ est le premier exemple historique d’algèbre unitaire, associative, non-commutative sur $\mathbb{R}$. Mais $\mathbb{H}$ est de plus un corps (comme il est non-commutatif, on dit aussi qu’il s’agit d’un anneau à division) : tout élément non-nul admet un inverse.
Plus tard, Frobenius allait montrer que les seuls corps qui soient de dimension finie sur $\mathbb{R}$ étaient (à isomorphisme près) $\mathbb{R}, \mathbb{C}, \mathbb{H}$.
Pour prouver que $\mathbb{H}$ est un corps, on utilise deux notions analogues à des notions de même nom définies pour les nombres complexes :
Le conjugué $\overline{q}$ et la norme $N(q)$ d’un quaternion $ q = a + i b + j c + k d $ sont définis par :
$$\begin{array}{l} \overline{q} = a - ib - jc - kd, \\ N(q) = a^2 + b^2 + c^2 + d^2 \in \mathbb{R}_+. \end{array}$$
On vérifie alors simplement grâce à la formule du produit donnée précédemment que l’on a l’égalité suivante, généralisant l’égalité $z \overline{z} = | z|^2$ vraie pour les nombres complexes :
$$ q \overline{q} = \overline{q} q = N(q).$$
Si $q$ n’est pas nul, alors sa norme non plus, et la dernière égalité nous montre que $(N(q))^{-1} \overline{q} \mbox{ est l'inverse de } q. $
La conjugaison et la norme vérifient aussi les relations de multiplicativité suivantes :
$$\overline{q_1 q_2} = \overline{q_2} \cdot \overline{q_1} \\ N(q_1 q_2) = N(q_1) N(q_2). $$
La première se vérifie à la main grâce à la formule du produit (attention au changement d’ordre des facteurs !). Quant à la deuxième, on peut procéder de même, mais c’est plus rapide de l’obtenir en combinant des formules déjà démontrées :
$$N(q_1q_2) = (q_1q_2) \overline{q_1 q_2} = q_1q_2 \overline{q_2} \: \overline{q_1} = q_1 N(q_2) \overline{q_1} = q_1 \overline{q_1} N(q_2) = N(q_1) N(q_2).$$
Les vidéos suivantes reprennent les thèmes abordés ci-dessus :
Point de vue intrinsèque
Les notions de partie scalaire, vectorielle, de conjugué et de norme, paraissant dépendre de la base choisie $1, i, j, k$, ne dépendent en fait que de la structure d’anneau de $(\mathbb{H}, +, \cdot)$ :
- $\mathbb{R}$ est le centre de $\mathbb{H}$, c’est-à-dire le sous-anneau des éléments qui commutent avec tous les autres ;
- l’ensemble $\mathbb{V}$ des quaternions purement vectoriels est formé par les quaternions dont le carré appartient à $\mathbb{R}_- = ]-\infty, 0]$ ;
- les deux ensembles précédents sont des sous-espaces vectoriels réels de $\mathbb{H}$ en somme directe ; donc tout quaternion s’écrit de manière unique sous la forme $s + v$ avec $s$ scalaire et $v$ vecteur, et son conjugué est $s - v$ ; la norme s’en déduit : $N(s + v) = s^2 - v^2$.
On voit que la norme munit $\mathbb{H}$ d’une structure d’espace vectoriel réel euclidien. C’est la base de l’interprétation géométrique des quaternions. Premièrement, $\mathbb{R}$ et $\mathbb{V}$ sont orthogonaux. Ensuite, la multiplication de deux vecteurs $v_1, v_2 \in \mathbb{V}$ se décompose ainsi en partie scalaire et partie vectorielle :
$$ v_1 v_2 = - (v_1, v_2) + v_1 \times v_2. $$
En calculant en coordonnées, on reconnaît que :
- $(v_1, v_2)$ est le produit scalaire dans l’espace vectoriel euclidien $(\mathbb{V}, N)$ ;
- $v_1 \times v_2$ est le produit vectoriel dans le même espace.
Souvenons-nous que le produit vectoriel nécessite une orientation pour être bien défini. Mais ici on tombe d’abord sur le produit vectoriel, avant d’avoir orienté l’espace. En fait, le produit des quaternions oriente $\mathbb{V}$ canoniquement, de telle manière que $v_1 \times v_2$ soit le produit vectoriel pour cette orientation : on décrète que les triplets de la forme $(v_1, v_2, v_1 \times v_2)$, avec $v_1$ et $v_2$ non-proportionnels sur $\mathbb{R}$, forment une base directe. Cette orientation est indépendante du couple $(v_1, v_2)$ choisi, car l’ensemble de ces couples est connexe par arcs.
On déduit immédiatement de la formule pour le produit de deux vecteurs la règle de multiplication de deux quaternions quelconques :
$$(s_1 + v_1) (s_2 + v_2) = (s_1 s_2 - (v_1, v_2) ) + (s_1 v_2 + s_2 v_1 + v_1 \times v_2).$$
Grâce à la définition précédente de l’orientation de $ \mathbb{V}$, on vérifie facilement que les relations fondamentales entre $i, j, k$ s’interprètent ainsi du point de vue géométrique :
$$ (i, j, k) \mbox{ forment une base orthonormée directe de } (\mathbb{V}, N). $$
Inversement :
Si l’on part d’un espace vectoriel euclidien orienté de dimension $3$, noté $E$, la règle de multiplication précédente permet de définir une structure d’algèbre isomorphe à $\mathbb{H}$ sur la somme directe $\mathbb{R} \oplus E$.
L’ensemble des isomorphismes de $\mathbb{R}$-algèbres entre $\mathbb{R} \oplus E$ et $\mathbb{H}$ est canoniquement en bijection avec l’ensemble des bases orthonormées directes de $E$.
Bien avant la théorie de la relativité restreinte, Hamilton interpréta cela comme le signe que l’espace et le temps devaient être pensés comme étant étroitement imbriqués, leur mélange donnant $\mathbb{H}$. Bien entendu, la révolution conceptuelle que proposera Einstein à partir des années 1905 va bien au-delà de cette première intuition.
L’ensemble des bases orthonormées directes de $E$ s’identifie canoniquement au fibré tangent unitaire de la sphère unité $\mathbb{S}_1(E)$ de $E$. Il s’identifie aussi, mais non-canoniquement, au groupe $\mathrm{SO}(E, N)$ des isométries directes (rotations) de $(E, N)$ : pour cela, il faut choisir un repère de référence. Si l’on travaille dans $\mathbb{H}$, on voit que l’analogue du groupe de Galois dans notre situation, c’est-à-dire le groupe d’automorphismes de l’extension de corps $\mathbb{H} : \mathbb{R}$ est précisément $\mathrm{SO}(\mathbb{V}, N)$.
Nous noterons désormais :
- par $\mathbb{S}^3$ la sphère des quaternions de norme $1$ ;
- par $\mathbb{S}^2$ la sphère des quaternions purement vectoriels de norme $1$.
La multiplicativité de la norme assure que, de manière analogue au fait que les nombres complexes de norme $1$ forment un groupe :
$\mathbb{S}^3$ est un groupe par rapport à la multiplication des quaternions, d’élément neutre $1$.
- Frank Adams
De même, la sphère $\mathbb{S}^0$ des nombres réels de norme $1$ et la sphère $\mathbb{S}^1$ des nombres complexes de norme $1$ sont aussi des groupes pour la multiplication. Mais, et ceci est essentiel pour la suite, au contraire de ses deux cousins de dimension plus petite, le groupe $\mathbb{S}^3$ est non-commutatif.
En fait, comme conséquence de travaux de topologie algébrique profonds d’Adams du début des années 1960, on peut montrer que les seules sphères qui puissent être munies d’une structure de groupe compatible avec la structure différentiable (groupe de Lie), sont $\mathbb{S}^0, \mathbb{S}^1, \mathbb{S}^3$.
Quaternions et rotations tridimensionnelles
Expliquons maintenant comment interpréter les rotations de l’espace euclidien tridimensionnel $(\mathbb{V}, N)$ grâce aux quaternions [2].
Cela passe par une décomposition polaire des quaternions, analogue à celle des nombres complexes :
$$q = \sqrt{N(q)} (\cos \theta + u \sin \theta). $$
Ici $u$ est un vecteur unitaire - donc, comme expliqué précédemment $u^2 = -1$ - c’est-à-dire un élément de la sphère unité $\mathbb{S}^2$ de $(\mathbb{V}, N)$ et $\theta \in \mathbb{R} / (2 \pi \mathbb{Z})$ est une mesure d’angle orienté. On a les ambiguïtés suivantes dans la détermination du couple unité-angle $(u, \theta)$ associé au quaternion $q$ :
- Lorsque $q \in \mathbb{R}_+^*$, on a $\theta =0$ et $u$ est quelconque.
- Lorsque $q \in \mathbb{R}_-^*$, on a $\theta =\pi $ et $u$ est quelconque.
- Lorsque $q \in \mathbb{H} \setminus \mathbb{R}$, le couple $(\theta, u)$ est défini de manière unique, à changement de signe simultané des deux membres près.
Pensons maintenant à la formule d’Euler pour les nombres complexes :
$$\cos \theta + i \sin \theta = e^{i \theta}.$$
Un analogue existe aussi pour les quaternions ! Tout d’abord, en utilisant le développement en série usuel on peut étendre l’opération d’exponentiation à l’algèbre des quaternions :
$$e^q := \sum_{k=0}^{\infty} \frac{q^k}{k!}. $$
On voit que cette série converge pour tout $q \in \mathbb{H}$ par le même raisonnement que sur $\mathbb{R}$, en regardant $\mathbb{H}$ comme algèbre normée pour la norme définie précédemment.
On a alors l’extension naturelle suivante de la formule d’Euler :
$$\cos \theta + u \sin \theta = e^{u \theta}.$$
La preuve est identique à celle faite sur $\mathbb{C}$, pour la bonne raison qu’on travaille en fait dans la sous-$\mathbb{R}$-algèbre de $\mathbb{H}$ engendrée par $u$, qui est canoniquement isomorphe à $\mathbb{C}$ par l’isomorphisme qui envoie $u$ sur $i$ !
Les rotations de $\mathbb{C}$ vu en tant que plan euclidien orienté s’interprètent algébriquement comme opérateurs de multiplication par les nombres complexes de module $1$. Les rotations de l’espace euclidien tridimensionnel $(\mathbb{V}, N)$ peuvent elles aussi s’interpréter algébriquement, cette fois à l’aide des quaternions de norme $1$, mais plus subtilement, grâce à l’opération de conjugaison :
Si $q = e^{u \theta}$ est un quaternion de norme $1$ (voir l’extension de la formule d’Euler), alors l’application de conjugaison par $q$ :
$$ \begin{array}{cccc} C_q : & \mathbb{H} & \to & \mathbb{H} \\ & w & \mapsto & qwq^{-1} \end{array} $$
est, en restriction à $\mathbb{V}$, la rotation d’axe dirigé par $u$ et d’angle $2\theta$.
Prouvons ce théorème. Constatons tout d’abord qu’il suffit de considérer le cas où $u=i$. En effet, par le théorème d’isomorphisme vu plus haut, il existe un automorphisme de la $\mathbb{R}$-algèbre $\mathbb{H}$ qui envoie $u$ sur $i$ et cet automorphisme préserve les structures euclidiennes et les orientations en jeu. Pour montrer que $C_{e^{i\theta}}$ agit bien de la manière décrite, il suffit de vérifier cela sur les vecteurs $(i,j,k)$. Les formules de base, immédiates à vérifier, qui permettent de le voir sont les suivantes :
$$ j e^{-i\theta} = e^{i\theta} j \mbox{ et } k e^{-i\theta} = e^{i\theta} k. $$
On en déduit :
$$ C_{e^{i\theta}}(j) = e^{i\theta} j e^{-i\theta} = (e^{i\theta})^2 j = e^{2i\theta} j = j \cos(2 \theta) + k \sin(2 \theta).$$
On a la formule analogue pour $C_{e^{i\theta}}(k)$. Quant à $C_{e^{i\theta}}(i)$, c’est juste $i$, parce que ce dernier calcul se fait dans la sous-algèbre commutative engendrée par $i$. On a donc bien dans les trois cas l’action indiquée. Le théorème est démontré.
Attention à ce phénomène de doublement d’angle ! En particulier, si $q = e^{u \frac{\pi}{2}} = u \in \mathbb{V}$ est un quaternion purement vectoriel de norme $1$, alors la rotation correspondante est le demi-tour par rapport à la droite de $\mathbb{V}$ engendrée par $u$. Donc les vecteurs de norme $1$ ne s’interprètent pas (via leur action) par des quarts de tour, comme pourrait pousser à le faire une analogie précipitée avec les nombres complexes de norme $1$, mais par des demi-tours. Ce fait est probablement l’une des raisons qui ont bloqué si longtemps Hamilton.
L’application :
$$C : \mathbb{S}^3 \to \mathrm{SO}(\mathbb{V}, N)$$
définie dans l’énoncé du Théorème (qui envoie $q$ sur la conjugaison $C_q$) est un morphisme de groupes. Son interprétation géométrique montre qu’elle est surjective et que son noyau est le sous-groupe $\{\pm 1 \}$ de $\mathbb{S}^3$. Comme $\mathbb{S}^3$ est une sphère de dimension $3$, donc simplement connexe, on obtient :
Le groupe fondamental de $\mathrm{SO}(3, \mathbb{R})$ est isomorphe à $\mathbb{Z}/ 2 \mathbb{Z}$.
La vidéo suivante revient sur certains des points abordés ci-dessus.
L’espace projectif réel et le groupe des rotations
Les quaternions permettent de penser non seulement aux rotations de l’espace euclidien tridimensionnel, mais aussi à son complété par l’hyperplan à l’infini, l’espace projectif tridimensionnel. Ils permettent en particulier d’identifier celui-ci au groupe des rotations d’un espace tridimensionnel. C’est ce que nous allons expliquer dans cette section.
Le quotient du groupe $\mathbb{S}^3$ par son sous-groupe $\{\pm 1 \}$ s’interprète géométriquement comme quotient d’une sphère ronde de dimension $3$ par l’application antipodale, ce qui s’identifie canoniquement au projectifié $\mathbb{P}(\mathbb{H})$ de $\mathbb{H}$ vu en tant qu’espace vectoriel sur $\mathbb{R}$. On obtient :
L’application $C$ induit un difféomorphisme $ c : \mathbb{P}(\mathbb{H}) \to \mathrm{SO}(\mathbb{V}, N)$.
On a même plus :
Le difféomorphisme $c : \mathbb{P}(\mathbb{H}) \to \mathrm{SO}(\mathbb{V}, N)$ envoie les droites projectives sur les translatés des sous-groupes à un paramètre de $\mathrm{SO}(\mathbb{V}, N)$.
Esquissons une preuve de ce fait. On commence par montrer cela pour les sous-groupes à un paramètre de $\mathrm{SO}(\mathbb{V}, N)$ eux-mêmes. Ce que l’on montre en fait est :
Les sous-groupes à un paramètre du groupe $\mathbb{S}^3$ sont les familles $\mathbb{S}^1_u := (e^{u \theta})_{\theta \in \mathbb{R}/ 2\pi \mathbb{Z}}$, à vecteur $u \in \mathbb{S}^2$ fixé et $\theta$ variable (voir la formule d’Euler étendue). Le morphisme de groupes $C : \mathbb{S}^3 \to \mathrm{SO}(\mathbb{V}, N)$ envoie le sous-groupe $\mathbb{S}^1_u \hookrightarrow \mathbb{S}^3$ sur le sous-groupe des rotations de $\mathrm{SO}(\mathbb{V}, N)$ d’axe dirigé par $u$.
Ensuite on constate que $\mathbb{S}_u^1$ est simplement le cercle unité dans le plan réel contenu dans $\mathbb{H}$ engendré (sur $\mathbb{R}$) par $1$ et $u$. C’est donc un grand cercle de la sphère tridimensionnelle $\mathbb{S}^3$, qui descend, par le quotient antipodal, en une droite projective de l’espace projectif réel $\mathbb{P}(\mathbb{H})$. Toutes les droites projectives qui passent par le point base $[1]$ (image de $1 \in \mathbb{H}$ par l’antipode) s’obtiennent de cette manière.
Le théorème précédent permet de visualiser l’espace projectif, ses droites et ses plans, à l’aide d’un corps rigide $K$ (une tasse, un stylo, une pomme, etc.). En effet, l’ensemble de ses positions (à translation près) s’identifie à $\mathrm{SO}(\mathbb{V}, N)$ dès que l’on a identifié l’espace ambiant à $\mathbb{V}$. Cette identification est non-canonique puisqu’il faut choisir une position de référence du corps rigide $K$. Toute autre position s’obtient alors, à translation près, par une unique rotation effectuée sur la position de référence. La vidéo suivante permet de "voir" l’élément d’ordre 2 dans le groupe fondamental de $\mathrm{SO}(3,\mathbb{R})$.
Il faut penser à chaque tranche de la ceinture comme à un corps rigide dans l’espace orienté $\mathbb{R}^3$ et donc à la ceinture elle-même comme un chemin d’éléments de $\mathrm{SO}(3,\mathbb{R})$, d’après ce que nous venons d’expliquer. Au début, toutes les tranches de la ceinture s’identifient les unes aux autres par de simples translations, ce qui correspond au chemin constant en l’identité du groupe fondamental de $\mathrm{SO}(3,\mathbb{R})$. Imprimer une rotation d’un tour complet à l’une des extrémités de la ceinture permet de visualiser un lacet a priori non trivial : c’est bien un lacet puisqu’on passe toujours d’une extrémité de la ceinture à l’autre par translation. La ceinture est bien vrillée et on sent bien que cette vrille est non triviale.
Le "miracle", c’est que lorsque l’on imprime un deuxième tour à la ceinture, ce qui correspond à prendre le carré du premier lacet dans le groupe fondamental de $\mathrm{SO}(3,\mathbb{R})$, il suffit de faire suivre à l’une des extrémités de la ceinture un chemin de translations pour ramener toute la ceinture dans sa position initiale : le carré de notre lacet initial est donc trivial.
Quaternions et rotations quadridimensionnelles
Ce ne sont pas que les rotations de $(\mathbb{V}, N)$ qui peuvent s’exprimer grâce aux quaternions, mais aussi celles de $(\mathbb{H}, N)$, c’est-à-dire les éléments de $\mathrm{SO}(\mathbb{H}, N) \simeq \mathrm{SO}(4, \mathbb{R})$. Cette interprétation est analogue à celle des rotations du plan euclidien $(\mathbb{C}, | \cdot |^2)$ en tant que multiplications par les nombres complexes de norme $1$.
En ce qui concerne $\mathbb{H}$, comme la multiplication est non-commutative, il y a une différence entre multiplications à gauche et à droite. De fait, il faut combiner les deux.
Plus précisément, introduisons l’opération de double multiplication suivante :
$$ \begin{array}{cccc} D_{q_1, q_2} : & \mathbb{H} & \to & \mathbb{H} \\ & q & \to & q_1 q q_2^{-1} \end{array} . $$
Ici $q_1, q_2$ désignent deux quaternions de norme $1$. La multiplicativité de la norme montre que l’on a ainsi un élément de $\mathrm{O}(\mathbb{H}, N)$. Comme $\mathbb{S}^3$ est connexe, et que pour $q_1 = q_2 =1$ on obtient l’identité, on déduit que $D_{q_1, q_2} \in \mathrm{SO}(\mathbb{H}, N)$.
L’application :
$$ \begin{array}{cccc} D : & \mathbb{S}^3 \times \mathbb{S}^3 & \to & \mathrm{SO}(\mathbb{H}, N) \\ & (q_1, q_2) & \to & D_{q_1, q_2} \end{array} . $$
est un morphisme de groupes. Son noyau est $\{ \pm 1 \}$, ce qui est une conséquence immédiate du fait que le centre de $\mathbb{H}$ est $\mathbb{R}$. Avec un peu plus de travail, on peut en déduire que le morphisme est surjectif. On obtient :
L’application $D$ induit un difféomorphisme :
$$( \mathbb{S}^3 \times \mathbb{S}^3) / \{ \pm 1 \} \to \mathrm{SO}(\mathbb{H}, N).$$
En particulier, le groupe fondamental de $\mathrm{SO}(4, \mathbb{R})$ est aussi isomorphe à $\mathbb{Z}/ 2 \mathbb{Z}$.
En fait, tous les groupes spéciaux orthogonaux $\mathrm{SO}(n, \mathbb{R})$, pour $n \geq 3$, ont un groupe fondamental isomorphe à $\mathbb{Z}/ 2 \mathbb{Z}$. La preuve générale peut passer par des algèbres généralisant celle des quaternions, les algèbres de Clifford.
- William Kingdon Clifford
Quaternions et groupes spéciaux unitaires
Les quaternions forment un espace vectoriel sur $\mathbb{R}$. Nous verrons qu’il est possible, en les regardant comme espace vectoriel sur $\mathbb{C}$, d’identifier le groupe des quaternions unitaires au groupe spécial unitaire $\mathrm{SU}(2, \mathbb{C})$. Mais auparavant, rappelons les notions de base de géométrie hermitienne nécessaires pour définir les groupes unitaires et spéciaux unitaires en dimension quelconque.
Soit $L$ un espace vectoriel de dimension finie sur $\mathbb{C}$. Une forme hermitienne sur $L$ est une application :
$$h : L \times L \to \mathbb{C}$$
qui vérifie :
- $h$ est $\mathbb{C}$-linéaire en la deuxième variable ;
- $h(w, v) = \overline{h(v, w)}, \: \forall \: v, w \in L$ ;
- $h(v, v) > 0, \: \forall \: v \in L \setminus \{0 \}$.
Attention, la convention de linéarité en la première variable est elle aussi très répandue.
Si $h$ est une forme hermitienne sur $L$, le groupe unitaire associé, noté $\mathrm{U}(L, h)$, est l’ensemble des automorphismes $\mathbb{C}$-linéaires de $L$ qui préservent $h$. Le sous-groupe spécial unitaire $\mathrm{SU}(L, h)$ est formé par les automorphismes qui sont de plus de déterminant $1$.
Lorsque $L= \mathbb{C}^n$ et que $h(v, w) = \sum_{l=1}^n \overline{v_l} w_l$, ces groupes sont notés $\mathrm{U}(n)$ et $\mathrm{SU}(n)$. Si $A^*$ désigne la conjuguée de la transposée d’une matrice $A \in \mathrm{GL}(n, \mathbb{C})$, alors :
$$\mathrm{SU}(n) = \{ A \in \mathrm{GL}(n, \mathbb{C}) \; | \; A^* A = I_n, \ \det A = 1 \}. $$
Interprétons maintenant une forme hermitienne sur un espace vectoriel complexe $L$ du point de vue de la structure d’espace vectoriel réel sous-jacente. La multiplication par un nombre complexe $a + ib$ est connue dès que l’on se donne la multiplication par $i$. Du point de vue réel, il s’agit d’un endomorphisme $\mathbb{R}$-linéaire $J: L \to L$ tel que :
$$ J^2 = -Id_L.$$
C’est ce que l’on appelle une structure complexe sur le $\mathbb{R}$-espace vectoriel $L$.
Quant à la forme hermitienne $h$, décomposons-là en parties réelles et imaginaires :
$$h(v, w) = (v, w) + i \: \omega(v, w).$$
On vérifie alors formellement que les axiomes intervenant dans la définition d’une forme hermitienne se traduisent ainsi en termes de $(\cdot, \cdot)$, $\omega$ et $J$ :
- $\omega(v, w) = (Jv, w)$.
- $(w, v) = (v,w)$ et $(Jv, Jw) = (v, w), \: \forall \: v, w \in L$.
- $(v, v) > 0, \: \forall \: v \in L \setminus \{0 \}$.
Se donner une forme hermitienne sur un espace vectoriel $L$ sur $\mathbb{C}$ revient à se donner une structure euclidienne sur un espace vectoriel $L$ sur $\mathbb{R}$, ainsi qu’une structure complexe $J$ qui est une isométrie de la métrique euclidienne.
La donnée d’une structure complexe $J$ sur un $\mathbb{R}$-espace vectoriel $L$ (qui est alors forcément de dimension paire sur $\mathbb{R}$) munit $L$ d’une orientation complexe canonique. En effet, on part d’une base quelconque $(e_1, \ldots , e_n)$ sur $\mathbb{C}$, et on décrète que $(e_1, Je_1, \ldots , e_n, Je_n)$ est une base directe. L’orientation obtenue ne dépend pas du choix de la base, car l’espace des bases sur $\mathbb{C}$ est connexe par arcs (il est homéomorphe à $\mathrm{GL}(n, \mathbb{C})$).
En particulier, si on se donne une structure complexe sur un $\mathbb{R}$-espace vectoriel préalablement orienté, alors on peut dire si elle est positive (l’orientation complexe associée coïncide avec l’orientation de départ) ou négative.
Appliquons cela au corps des quaternions $\mathbb{H}$. En tant que $\mathbb{R}$-espace vectoriel, $\mathbb{H}$ peut être canoniquement orienté en décrétant que $(1, i, j, k)$ est une base directe. On peut donc dire si une structure complexe sur $\mathbb{H}$ est positive ou négative.
En fait les structures complexes qui sont de plus des isométries pour $N$ (donc les structures hermitiennes de norme $N$, d’après le Lemme), sont très faciles à décrire à l’aide de la multiplication des quaternions :
- Les structures complexes positives qui sont des isométries de $(\mathbb{H}, N)$ sont exactement les morphismes de multiplication à gauche par un vecteur unitaire de $\mathbb{V}$ :
$$L_u : v \to uv, \mbox{ avec } u \in \mathbb{S}^2.$$
- Les structures complexes négatives qui sont des isométries de $(\mathbb{H}, N)$ sont exactement les morphismes de multiplication à droite par un vecteur unitaire de $\mathbb{V}$ :
$$R_v : v \to vu, \mbox{ avec } u \in \mathbb{S}^2.$$
Le fait que ces endomorphismes sont des structures complexes isométriques pour la norme provient de la multiplicativité de la norme et du fait que $\mathbb{S}^2$ est l’ensemble des quaternions de carré $-1$. La propriété de positivité/négativité provient de la connexité de $\mathbb{S}^2$ (une sphère bidimensionnelle) et du fait qu’elle est vérifiée pour $u =i$. Par exemple, si on regarde la multiplication à gauche par $i$, une base directe pour l’orientation complexe associée est $(1, i \cdot 1, j, i \cdot j) = (1, i, j, k)$, qui est bien directe pour l’orientation de $\mathbb{H}$ fixée conventionnellement.
Soit maintenant $q \in \mathbb{S}_1(\mathbb{H})$. Notons par :
$$\begin{array}{cccc} R_q : & \mathbb{H} & \to & \mathbb{H} \\ & h & \to & hq \end{array} $$
l’application de multiplication à droite par $q$ et par :
$$\begin{array}{cccc} R : & \mathbb{S}^3 & \to & \mathrm{SO}(\mathbb{H}, N) \\ & q & \to & R_q \end{array} $$
la famille de ces applications.
L’application $R$ est un anti-isomorphisme de $\mathbb{S}^3$ sur le groupe spécial unitaire $\mathrm{SU}(\mathbb{H}, N, L_u)$, pour la structure complexe $L_u$ induite par la multiplication à gauche par n’importe quel vecteur unitaire $u \in \mathbb{S}^2$.
Il suffit de vérifier ce théorème lorsque $u =i$. Prenons $(1, j)$ comme base de la structure de $\mathbb{C}$-espace vectoriel de $\mathbb{H}$ induite par $L_i$.
Un quaternion :
$$q = a + ib + jc + kd = (a + ib) + (c + id)j$$
a donc les coordonnées $(z_1, z_2) = (a+ib, c+id)$ dans cette base. La matrice de la multiplication à droite $R_q$ est donc, dans la même base :
$$\left( \begin{array}{cc} z_1& - \overline{z_2} \\ z_2 & \overline{z_1} \end{array} \right),$$
qui est bien une matrice spéciale unitaire (puisque $| z_1 |^2 + | z_2 |^2 =1$). On a obtenu :
L’anti-isomorphisme $R : \mathbb{S}^3 \to \mathrm{SU}(\mathbb{H}, N, L_i)$ s’écrit :
$$ (z_1, z_2) \to \left( \begin{array}{cc} z_1& - \overline{z_2} \\ z_2 & \overline{z_1} \end{array} \right),$$
si l’on munit $\mathbb{H}$ de la base $(1,j)$ en tant que $\mathbb{C}$-espace vectoriel pour la structure complexe (positive) $L_i$.
Si on veut par contre obtenir un isomorphisme plutôt qu’un anti-isomorphisme, on doit alors envoyer $q$ sur $R_{q^{-1}}$. On obtient ainsi la représentation matricielle suivante :
$$ (z_1, z_2) \to \left( \begin{array}{cc} \overline{z_1}& \overline{z_2} \\ - z_2 & z_1 \end{array} \right).$$
Quaternions et fibration de Hopf

Revenons à la bijection entre bases orthonormées directes et rotations de $(\mathbb{V}, N)$ mentionnée déjà dans la section sur les analogies entre quaternions et nombres complexes. Si on prend comme référence la base orthonormée directe $(i,j,k)$ de $(\mathbb{V}, N)$, alors toute rotation $r$ de $\mathrm{SO}(\mathbb{V}, N)$ s’identifie via cette bijection à la base orthonormée directe $(r(i), r(j), r(k))$ de $(\mathbb{V}, N)$. Cette dernière peut être vue aussi comme l’élément $(r(i), r(j))$ du fibré tangent unitaire $T_1 \mathbb{S}^2$ de la sphère unité $\mathbb{S}^2$, en pensant à $r(i)$ comme à un point de la sphère et à $r(j)$ comme à un vecteur tangent unitaire en ce point. La condition de positivité détermine alors le dernier vecteur $r(k)$ de manière unique.
Question : comment se relève la fibration tangente en cercles de $T_1 \mathbb{S}^2$ à $\mathbb{S}^3$, via l’application de conjugaison $C : \mathbb{S}^3 \to \mathrm{SO}(\mathbb{V}, N) = T_1 \mathbb{S}^2$ ?
Cela revient à se demander quel est l’ensemble des quaternions $q \in \mathbb{S}^3$ tels que $C(q)(i) = C(q_0)(i)$, pour $q_0 \in \mathbb{S}^3$ fixé. Cette relation se réécrit :
$$q = h q_0, \mbox{ avec } h \in \mathbb{S}^3 \mbox{ vérifiant } hi = ih.$$
On vérifie immédiatement que les $h\in \mathbb{H}$ qui commutent avec $i$ sont précisément les quaternions de la forme $a + ib$. D’où :
Considérons l’application de conjugaison :
$$\begin{array}{cccc} C : & \mathbb{S}^3 & \to & T_1 \mathbb{S}^2 \\ & q & \to & (qi q^{-1}, qj q^{-1}) \end{array} . $$
La fibration en cercles tangents sur $T_1 \mathbb{S}^2$ se relève en la fibration de Hopf de $\mathbb{S}^3$ par les intesections de cette sphère tridimensionnelle avec les droites complexes de $\mathbb{H}$, muni de la structure complexe $L_i$.
En particulier, la droite projective complexe des droites complexes de $\mathbb{H}$ muni de la structure complexe $L_i$ s’identifie à la sphère unité de $\mathbb{V}$. La même chose est vraie pour toutes les structures complexes $L_u$, avec $u \in \mathbb{S}^2$ variable. Remarquons le fait suivant, qui fait le lien avec les considérations du paragraphe sur les liens entre l’espace projectif réel et le groupe des rotations :
Le sous-groupe à un paramètre $\mathbb{S}^1_u := (e^{u \theta})_{\theta \in \mathbb{R}/ 2\pi \mathbb{Z}}$ est l’intersection de la sphère $\mathbb{S}^3$ avec la droite complexe passant par $1 \in \mathbb{S}^2$ de la structure complexe $L_u$ de $\mathbb{H}$. C’est donc la fibre passant par $1$ de la fibration de Hopf associée à $u$.
D’autres considérations géométriques sur les quaternions, les rotations, les structures complexes associées et le spin se trouvent dans les livres de Thurston [3], Penrose [4] et Dieudonné [5]. Enfin la préface du livre d’Hamilton [6] explique de manière détaillée mais souvent obscure comment Hamilton a été amené à sa découverte. Si on s’intéresse plus particulièrement à la tentative de Hamilton de définir un produit pour triplets de réels, on trouvera dans le livre de Dieudonné la preuve du fait qu’un tel produit n’existe pas si on demande qu’il représente convenablement les rotations de l’espace tridimensionnel.
La vidéo suivante revisite les liens entre sphère de dimension 3 et quaternions. [7]
[1] On pourra lire plus de détails sur la manière dont se stabilisa la notation $i$ pour $\sqrt{-1}$ dans l’article « Écrire les imaginaires » de Patrick Popescu-Pampu, Images des Mathématiques, CNRS, 2015.
[2] Le lecteur curieux de découvrir comment Hamilton lui-même présenta le lien entre quaternions et rotations, ainsi que les travaux reliés de Rodrigues et Cayley, pourra consulter l’article suivant : Jose Pujol, On Hamilton’s nearly-forgotten early work on the relation between rotations and quaternions and on the composition of rotations. American Math. Monthly 121 (2014), 515-522.
[3] William Thurston, Three-dimensional geometry and topology. Princeton Univ. Press, 1997, voir pages 103—108.
[4] Roger Penrose, À la découverte des lois de l’Univers. Odile Jacob, 2007, voir Chapitre 11.
[5] Jean Dieudonné, Algèbre linéaire et géométrie élémentaire. Hermann, 1968, voir l’Annexe IV.
[6] William Hamilton, Lectures on quaternions. Dublin, Hodges and Smith, 1853.
[7] Attention, une légère erreur s’est glissée dans l’orientation de l’une des familles de cercles de Villarceau, dont l’orateur s’est rendu compte vers la fin de son exposé. En effet, les cercles rouges de Villarceau doivent être orientés de manière opposée à ce qui est représenté dans le dessin, afin de rejoindre par continuité l’orientation de l’axe vertical.